
ベース車両

輸入代行業者を活用して、1688.comから購入しました。別の目的で購入したのですが、諸事情によりこれをベース車両として改造していきます。この手の高額なモノや車両系の購入は、みなさん、十分に気を付けてください。
ある日突然、ピンポンが鳴り、トラックが一台。荷下ろしを手伝ってほしいと。いつ配達されるのか、問い合わせ中にいきなり届きました。
開封して、組み立てて、電源ON、アクセルON、、、ビクとも動きませんでした。メーカーに問合せしても要領を得ず、やり取りは英語でサイトのチャット。埒が明かず、バラシて点検すると、断線3本を発見し、修理すると動作できるようになりました。
断線や、ブレーキワイヤーの被覆の剥けなど、多々あり、保障請求のやりとりを数か月間しても、修理できたのだから問題ないだろうという発想のようで、保障する気がないことがわかり断念しました。。。
作りも、工程も、はやり、という感じで、開封した時、箱の中にビスが3本も落ちているし、なぜか逆さま(裏返し)に車体が入っているし、あちらこちらでビスゆるみがあり、本体と取説が一致していない取説が入っているし。良いとこなしです。
アクセルMAX(20Km/h)で走行すると、前輪がブレてハンドルが激しく振れて転倒しそうにもなりました。
アライメントという概念がないようで、前輪左右の取り付けを測定すると前後、上下に5mmも差がありました。
この車両は、ハンドルは回転せず、重心移動で左右に曲がります。構造はスケートボードと同じです。
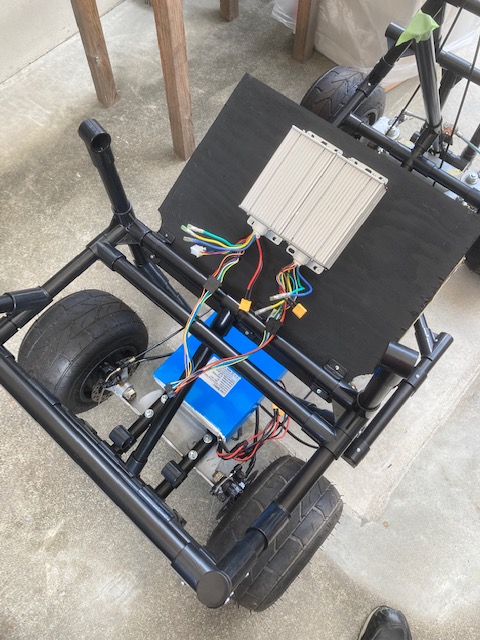
電動カート(EV)化
気を取り直して、まずは、回転ハンドルで舵角ができる電動カートに改造します。イメージは電動ゴーカートですが、電動バギーのように仕立てようと思います。
六角ボルト、ネジロック、緩み止めナットなので、固くてなかなか作業が捗りません。電ドラでは回せませんでした。ハンマーモードでやっとです。普通はインパクトが必要です。
それでも、緩んでいるボルト、ナットは数か所以上もありました。このまま走行していたらと思うとゾッとします。
シャーシになる部分の部品の繋ぎ合わせで長穴になっているところは、斜めに取り付いているし、二つの部品を合わせて取り付ける穴径がそれぞれ違っている箇所は、ワッシャーを重ねてどうにか付けているので、ナットの締め付けでワッシャーが歪んで緩んでいる状態。
スピードを上げると車体がブレて当然な組み立て方でした。カシャカシャ聞こえていたのは、緩んでいたナット、ワッシャーだったのでしょう。ケガする前にバラして良かったです。天からの思召しだったのかも知れませんね。
白箱、フタ、中のバッテリー、モータードライバーは全体的に両面テープやコーキング材で固定していて雑です。斜めになっていたり、整理された収め方になっていないのです。
ノリ残りで手や工具がベタベタになりストレスでした。すべてきれいに剥がしとり、ノリ残りも除去しました。これだけで数時間かかりました。両面テープで固定、、、あり得ない作りです。もちろん防水になっておりません!


PoC (Proof of Concept) Part 1
PoCとは、概念実証と訳されます。原理試作の位置づけで考えています。
やり直しがしやすいよう、改造がしやすいよう、改善もしやすいように、かつ、あまりお金がかからないように作り込んでいきたいと思います。
それでは、電動カートに必要な部品をEVスクーターの部品を加工して制作していきます。

EVスクーターはすべてバラバラにして、部品単位にしました。
これは、コイルと車体の接合部の部品ですが、フロント車輪を操舵するために、フロントタイヤの車軸受けに改造します。
車軸が通る穴を開けていきます。
板厚5mmの鉄板にΦ17mmの穴はなかなか開きません。手持ち電動ドライバーで開けましたが、何度も電ドラの保護回路が働き停止しました。
下の写真は完成した車軸受けです。



これはフロントの車体フレームをグラインダーで切り出し、左右の車輪を通す穴を開けています。
同じく5mmの板厚で大変でした。
これはフロントタイヤを支えていたフレームです。余計な左右を切り落とします。左右の車輪を通す穴を開けています。




上記の部品を組み立てるとこうなります。
ステアリングで舵角できるようになります。
上部の黒い板金は、アッカーマン理論に基づくために後ほど出てきます。
簡単に言うと、ハンドルを切った時、左右のタイヤの角度を変えるためです。
右に切った時は、左側のタイヤが右側のタイヤの切れ角より外向きに開かせます。
左に切った時はその逆です。
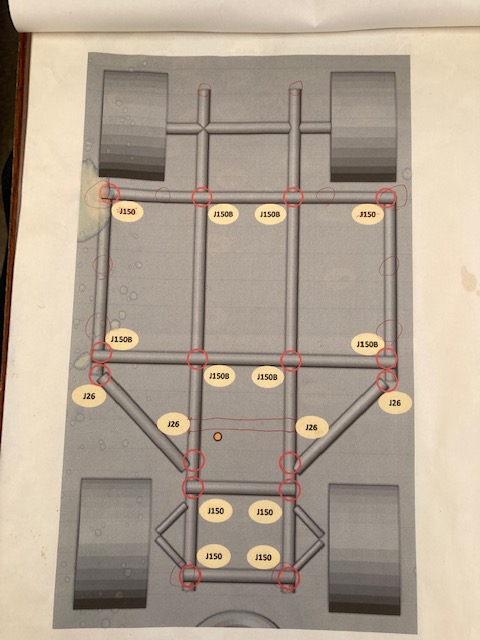
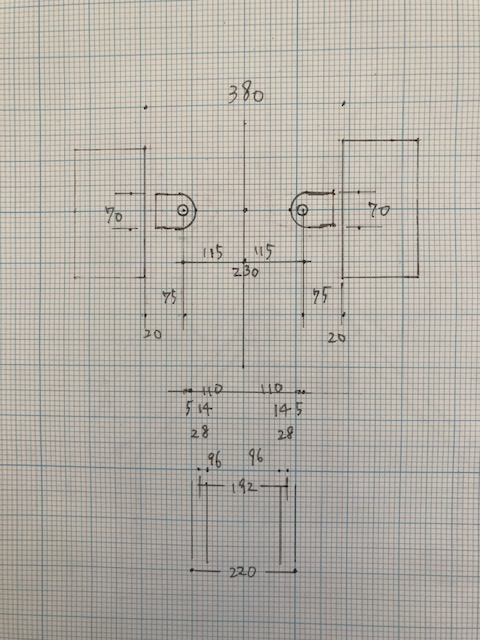
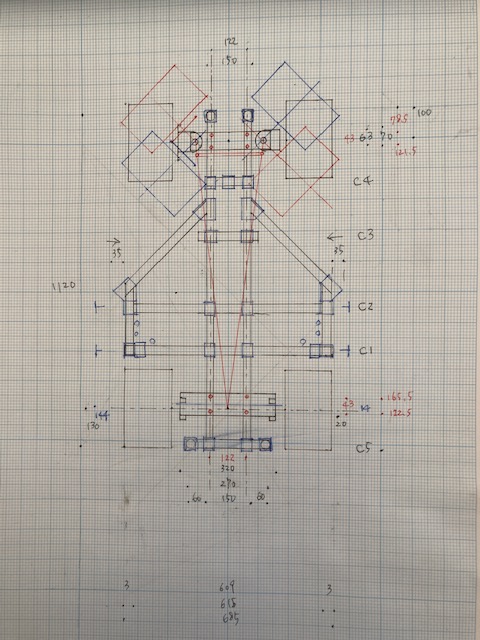
ラフ図
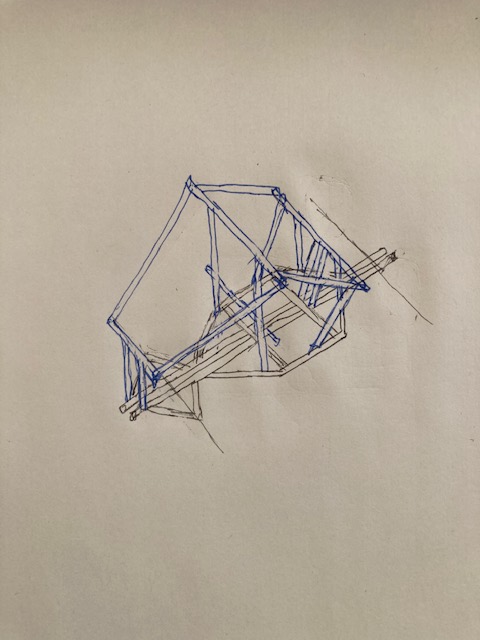
車体フレームのイメージ図のラフ図です。
バラした部品や寸法、モノを見ながら、全体的な仕上がりをイメージしておきます。
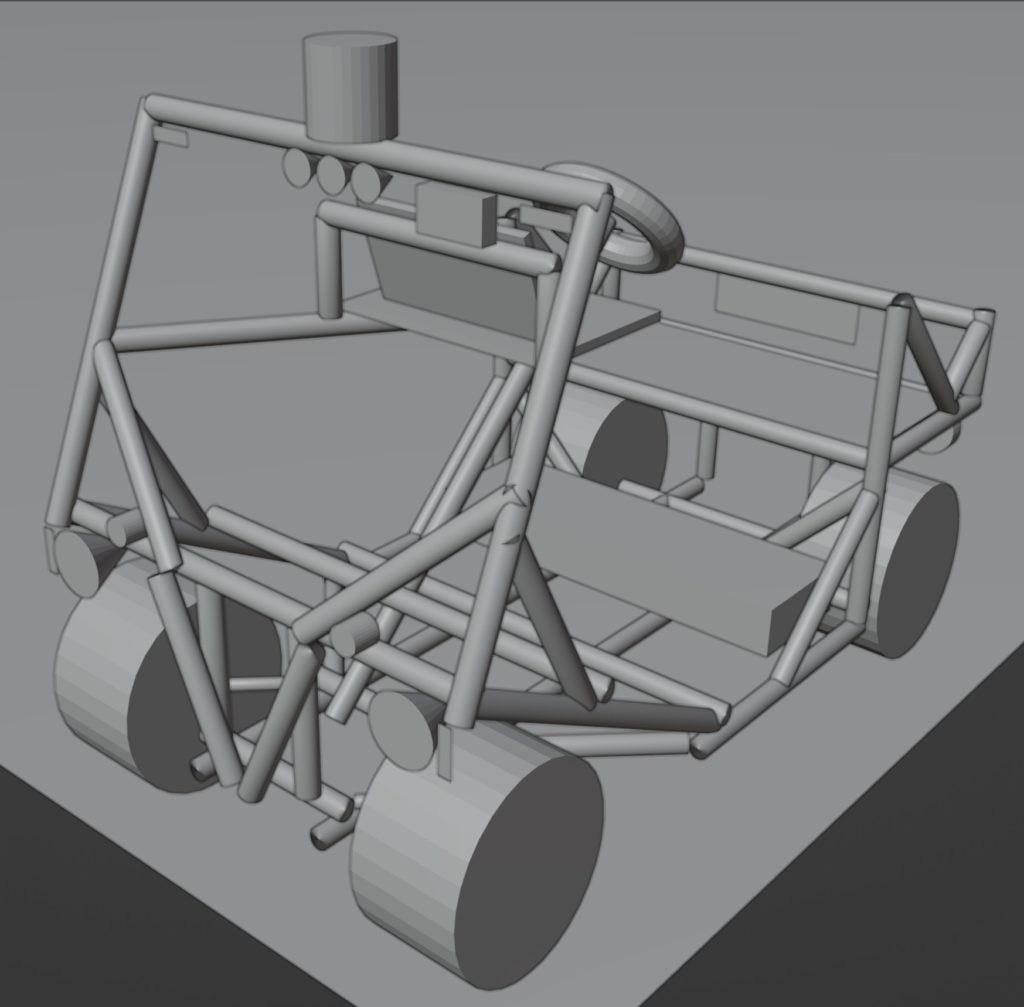
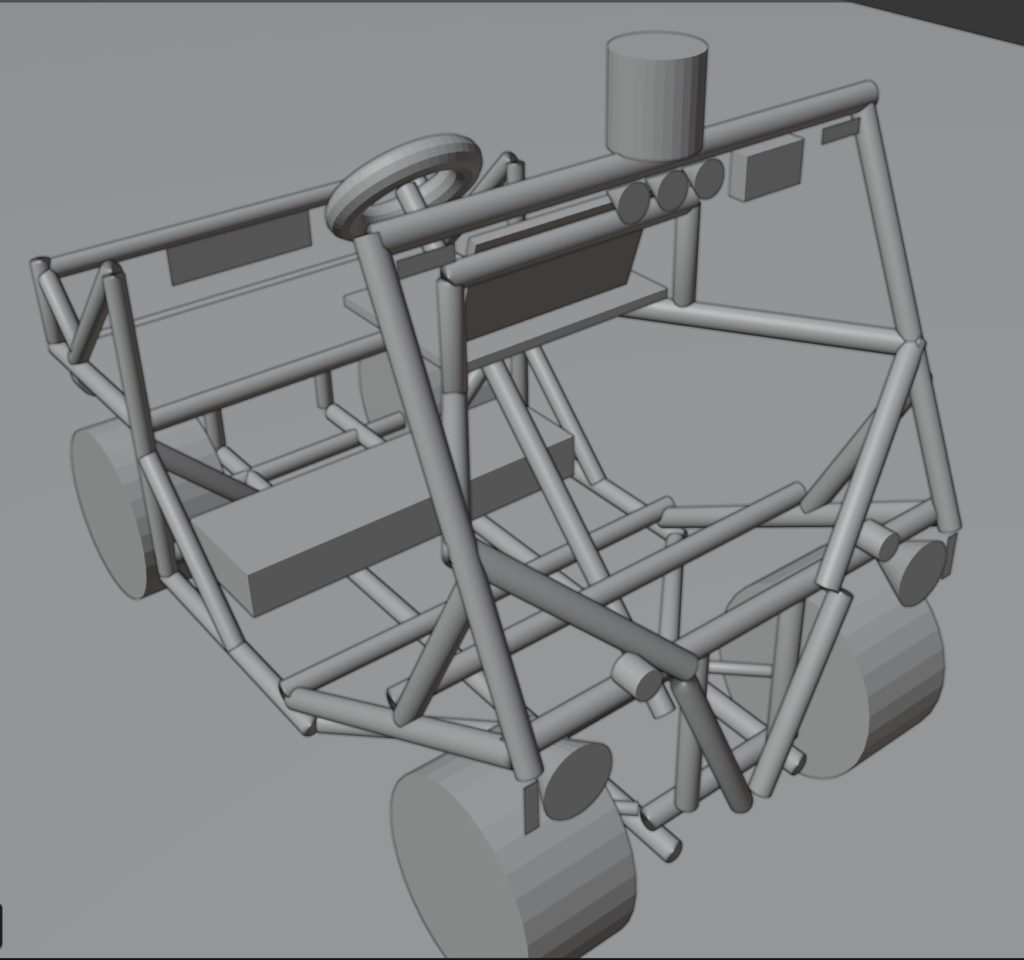
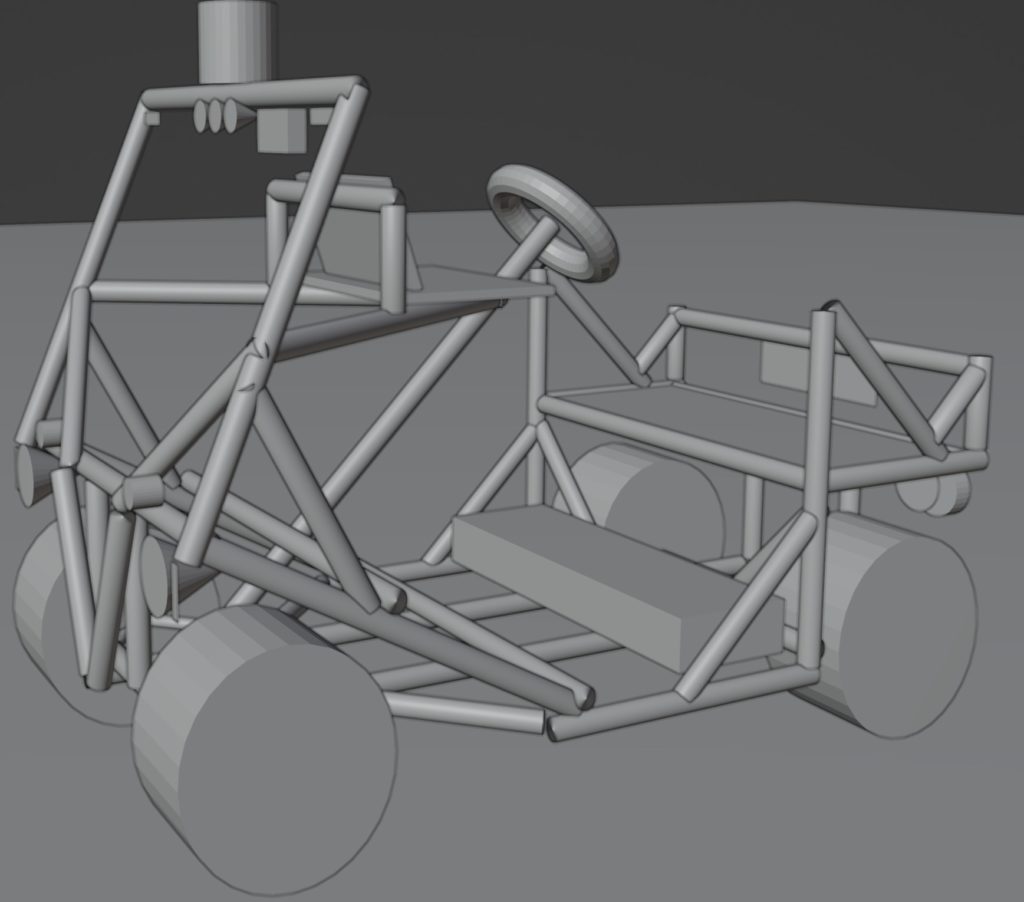
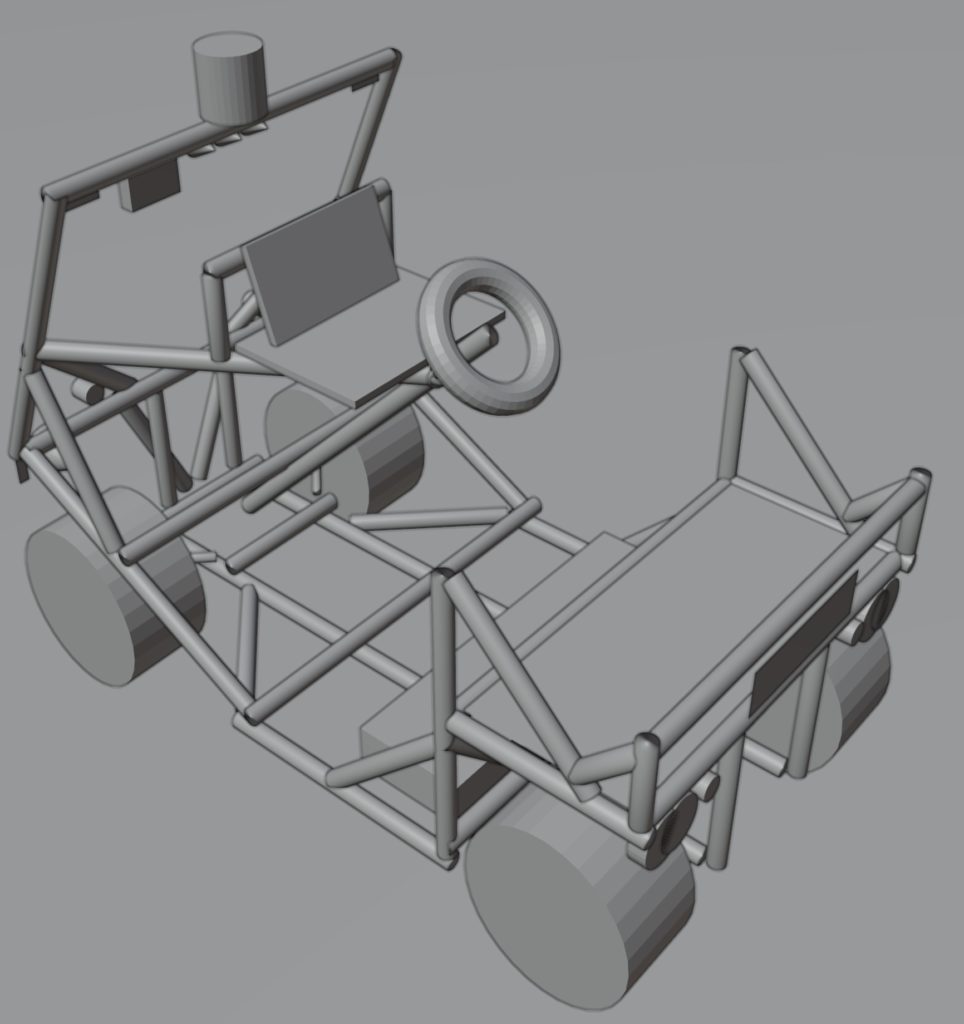
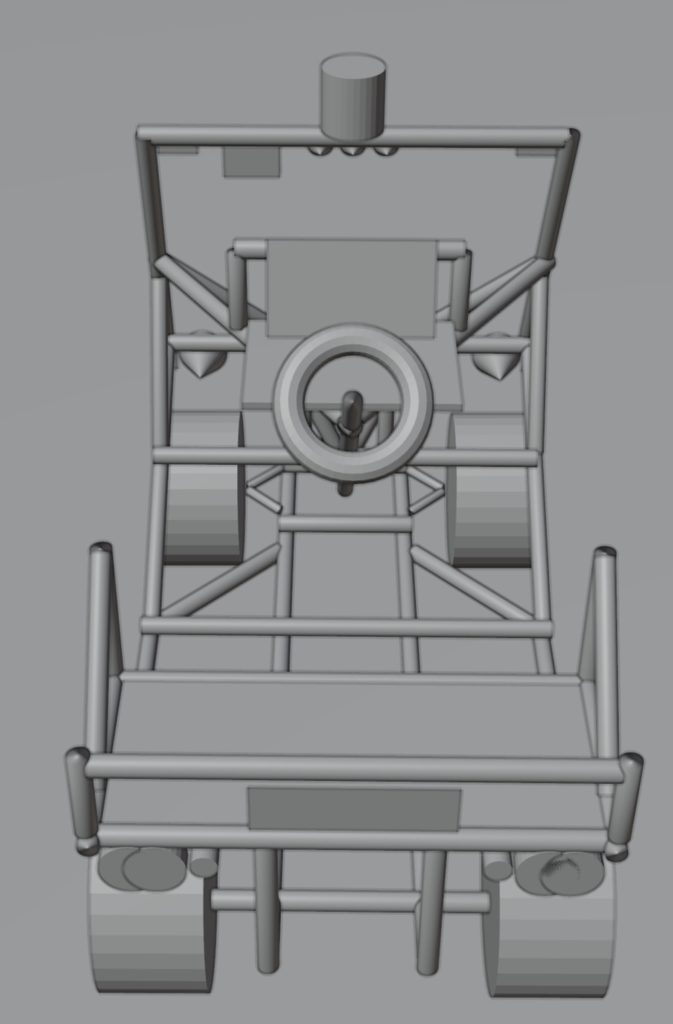
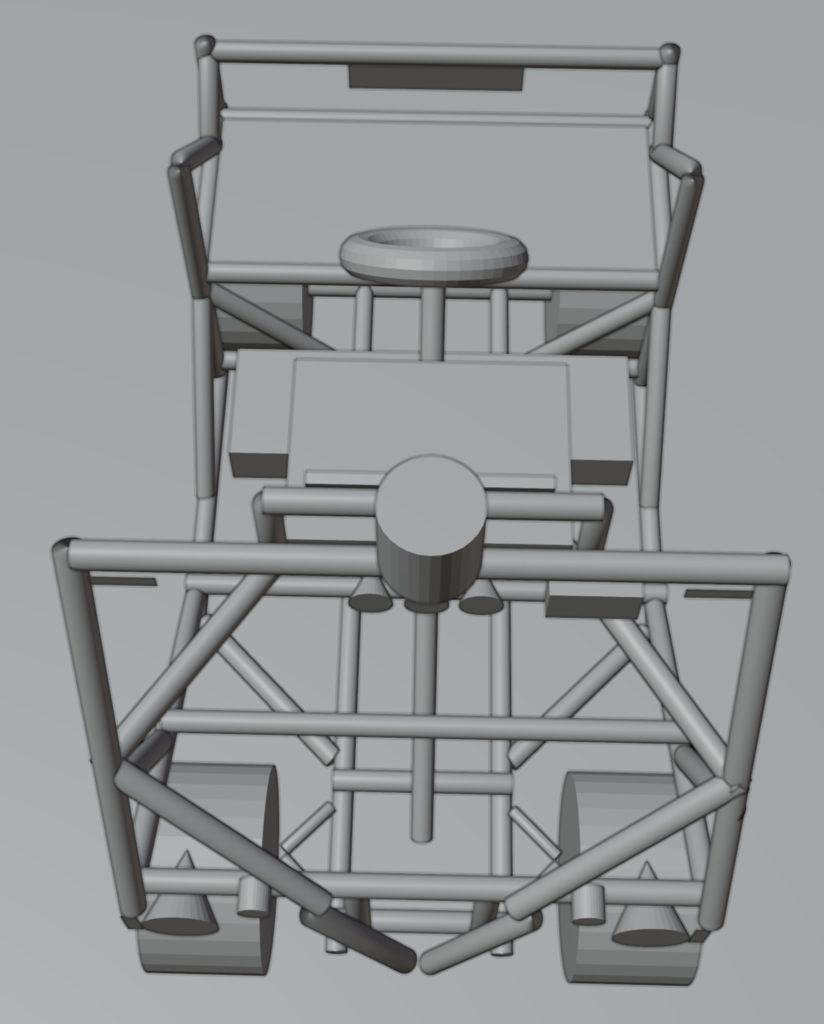
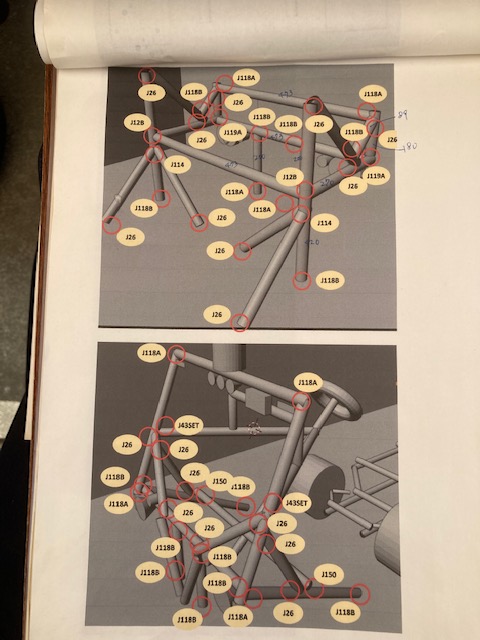
レンダ
このラフ図から以下に3Dソフトでイメージを進化させています。
リアも同様にとは行かず、下の写真のように軸受はそのまま使いますが、イメージ図にもある車体フレームが通るようにグラインダーで切り欠きを入れてパイプが収まるようにしています。これがまた大変でした。

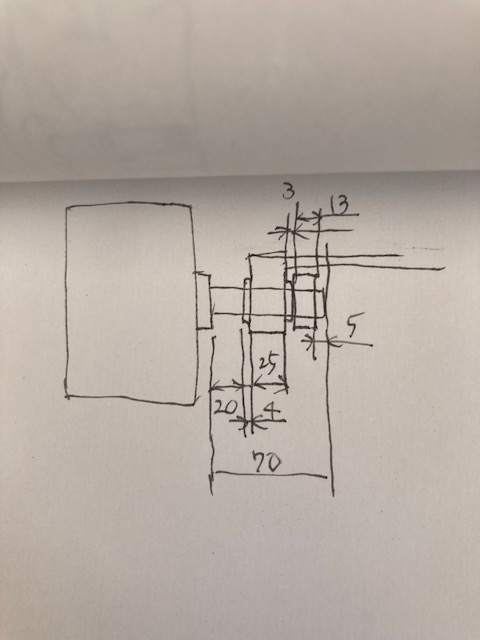
加工する線を描いています。5mmの鉄板にどうやって半円加工できるのか考えながら、組み立てに必要な部分と強度を考えながらで時間がかかります。




前から後まで通す長いパイプには、フロント車輪のASSYとリア車輪のASSYを接合する貫通させた穴を前後共に垂直にパイプに穴を開けるのですが、位置だしや垂直に貫通加工が大変でした。
Φ28mmのパイプにM8の穴を開けるだけでも難しく、垂直に貫通させなければならず、穴と穴の間の寸法もズレないようにしなければなりません。
PoC (Proof of Concept) Part 2
車体フレームを現物合わせで制作していきます。気を付けたいのは、強度と今後追加していく部品配置スペースの確保です。

何とか、組み上げることができました。組み上げ寸法誤差1mm以内でした。
全体感が見えてうれしくなりました。
ここまでは部品作りが主だったので、夢が膨らんでいきます。



勢いよく組み上げているように見えるかも知れませんが、とんでもございません。
各部分の出来上がり寸法を現物合わせの実測で決めていき、その前に、設計図も同時に作り計算しての作業をしておりました。
今回はPoCなので、改造、修正がしやすいように溶接ではなく、パイプジョイントを使っています。
このジョイントの種類を一通り覚えて、最適なジョイントを選び、パイプと組み合わせた時のパイプ寸法を逆算して、パイプカッターで切断して、断面のバリ取りをして、組み立てて、寸法確認してを繰り返していました。
寸法が合わない。。。何度もありました。だいたい、暗算でやった時です。スマホ電卓に切り替えてからはほぼなくなりました。
パイプカットはクルクル回しながら切るパイプカッターを使用していますが、左手で握り絞め、右手でカッターを廻してを繰り返すと、マメができて、潰れて、腕はパンパンになり、相当な体力を消耗しました。当然、上半身筋肉痛でした。一日でできる回数は体力次第でした。
カッターの刃の交換タイミングも2枚目から3枚目に変えた時の切れ味でだいたい分かってきました。

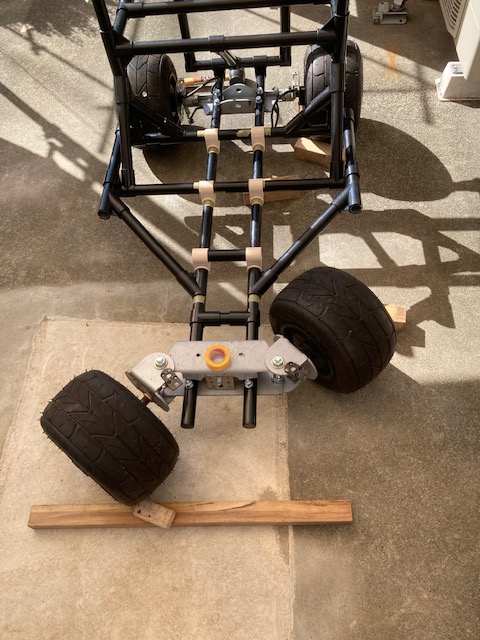
タイヤの舵角の支点がタイヤから遠いので、左右の段差が大きくなっています。
これは、最初に加工した車軸の部材と、フロントタイヤから車軸が出ているタイプの車輪なので、こうなってしまいました。
そのため、足元のフロアー面積が削られてしまっています。部品を買うと高いので今回は自作部品で辛抱しています。
乗用車やゴーカートなどは、支点がタイヤにより近いので、このようにはなりません。ホイール内側ギリギリに支点が設定されています。
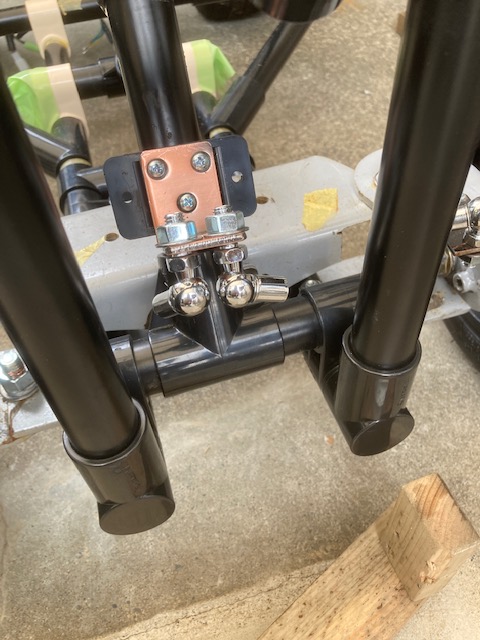
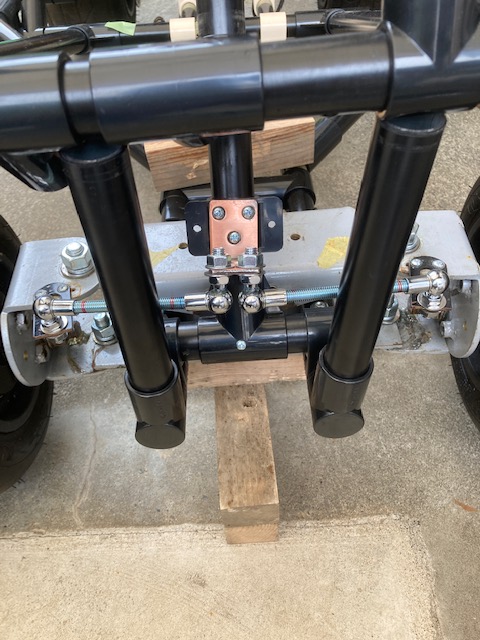
下は、先ほどのアッカーマン理論です。(厳密には少し違いますが。)
後輪の車軸中央から左右の車輪舵角の回転の中央点上に舵角を担う(黒い板金の)穴の中央が来るようにします。
車軸より前に取り付けたので、前方が開いています。車軸より後ろに付けると、車軸から見ると狭まります。


実際には、黒板金固定の時にビスが滑りズレています。



角度、長さ、高さなどを現物合わせで試行錯誤。




PoC (Proof of Concept) Part 3
ステアリングで舵角操舵ができるように設計して、部品加工、組み上げしていきます。
乗用車では、アライメント調整と言われている作業になります。普通車は、前方方向に向かってタイヤの前方の方がほんの少し蟹股のように開いています。これは、直進性をよくするためです。レーシングカーは左右が平行か少し内股に設定してコーナリング特性を良くしています。
今回は、ロッドエンドボールベアリングのガタが大きいので左右平行に設定しています。

最初はビクともしませんでした。可動部のボルトナットの締め付けが強すぎていたのと、オイルを塗り忘れていました。
締め付けトルクの調整とオイル塗布でスイスイになりました。ナットが抜け落ちないように、ボルトにホースクリップをつけて留めています。本来はEリングですね。ちょうど良いをサイズを探せずクリップにしています。
もっと本来は、クレビスピンと割りピンで留める方法ですかね。
PoC (Proof of Concept) Part 4
ステアリングを制作します。
本当は、金属で加工したかったのですが、ハードルが高いので、今回は加工しやすい木材で制作します。









PoC (Proof of Concept) Part 5
現物合わせで設計しながら進めてきたので、イメージラフ図とは程遠くなりましたが、車体フレームはいったん完成させます。
パイプとジョイント部分は緩いので、本来は専用ボンドで固定しますが、後々の改造を考慮して、ビス止めにします。
ドリルビスという便利な部品があります。ドリルで穴開けてからビスを打つ手間がドリルビスで同時にできます。


ビス打ち固定したことで、車体フレームのゆがみもなくなり、強度も増しました。
次はディスクブレーキの取り付け、調整です。
ここでも問題があり、車軸受けフレームのブレーキを取付箇所の精度が全く出ていません。ここはEVスクーターの時のままで加工していませんので、最初からです。
バラしたとき、半分にカットしたワッシャーが出てきて何だろう?と思っていたのですが、取り付けた時の傾き調整で挟み込んでいたワッシャーでした。なんという雑さでしょうかね。ブレーキは車両として重要な役割をもっている部分なのにこのような状態で販売していることが信じがたいです。



これで、走る、止まる、曲がるの3要素の走る以外ができました。
PoC (Proof of Concept) Part 6
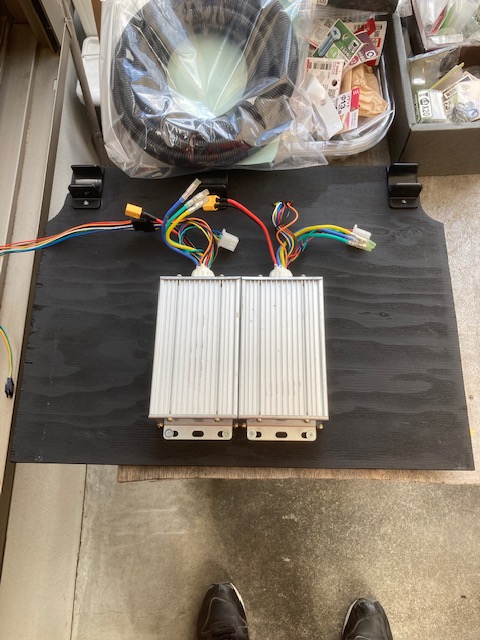
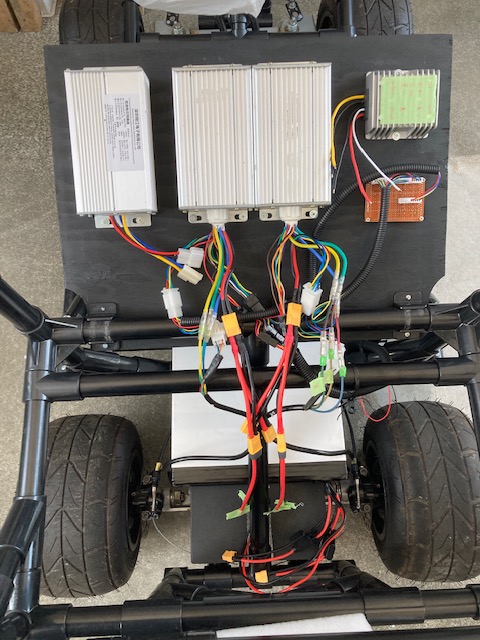
機構部分は完了したので、ここからはいよいよ、EVの電装部分を組んでいきます。
EVの要素は、電気バッテリー、モータードライバ、モーター、タイヤ、制御コントローラーになります。
EVスクーターの購入の動機の一つになったこととしては、リチウムイオン電池2000A/h 60Vと、ブラシレスインホイールモーターです。
インホイールモーターは、モーターとタイヤが一体になっているものです。
制御コントローラーでモータードライバへ信号を送り、モータードライバがリチウムイオン電池からもらった大電流を受け取った信号に合わせてインホイールモーターへ送り、タイヤが回転します。
その設置と接続をしていきます。



(怪しいですが)


(喜びのひとつです)



すべての配線を接続して、さぁ、電源ON、アクセルレバーON!
左タイヤしか廻りません。。。あら?
配線を見直しても異常はなさそう。。。もう一度、抜いて挿して、アクセルレバーON!
今度は廻らなかった右タイヤが一瞬ガクっと動きましたが、停止状態継続。前進/後進スイッチを切り替えてもダメです!
ダメなところが多いEVスクーターなので、疑いを持ってしまいます。開封時に電源ONせず、ショート断線していたことが頭をよぎりました。やっぱり、どこか半壊しているのでは。。。と。
ここから、半日X5日間、ハマりました。
モータードライバとインホイールモーターの組合せを変えると、問題はインホイールモーター側についてきます。
各端子の電圧をチェックして比較します。コネクターのオスメスの両方の背中側もチェックします。
コネクターのオス端子がハウジングの中で外れていました。ジョイントした時、緩い感触があったのですが、やはり、接触不良。
すかさず、AMAZONでコネクターセットを注文。
アクセルレバーON!
まだダメです。
モータードライバをバラします。
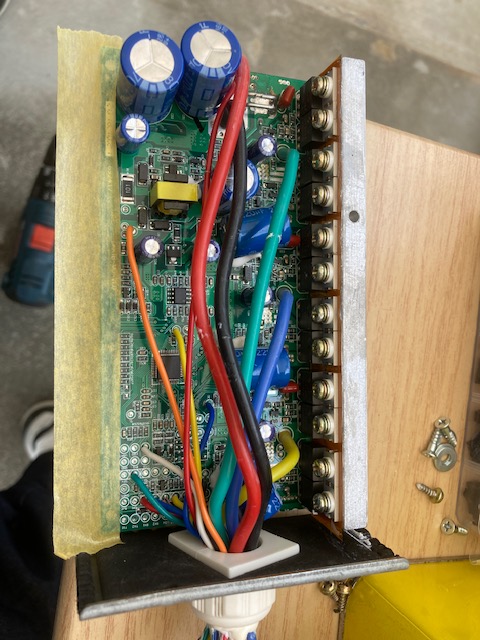

このレールと基板のパターンが接触していました。見れば見るほど、色々出てきます。テープを貼って(左写真)ショート防止処置を施しました。
アクセルレバーON!
まだダメです。
インホイールモーターを点検します。

このような亀裂は要注意です。水がしみ込んで、毛細管現象のように下はもちろん、上にも水が上がっていきます。
このケーブルの行先はインホイールモーターの制御回路基板ですので、回路基板に水が入ってしまうとショートの原因になります。
顔が歪みました。。。


ここが、接触、非接触になっている可能性あり。
どう考えても買ったときから、工程で起きてる不良です。

原因は他にもないか、インホイールモーターの中も点検します。
ディスク、フタのビスを外しても、フタが開きません。。。力を入れるとディスクで手を怪我しそうなので、モーメント力で開けるためにディスクに輪留めとしていた角材を取り付けて、廻します。フタが取れましたが、ボンド付けされていたようです。


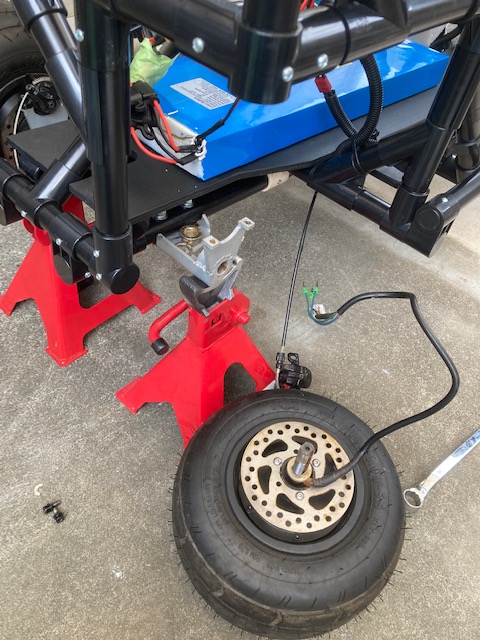
インホイールモーターを復元し、車体に取り付けて、配線を接続。
左右のタイヤを同じ方向に回転させるのに、片方の配線の接続を逆にする必要があります。
これでやっと、正常動作するようになりました。原因はインホイールモーターの断線による接触不良、コネクターハウジング内での端子外れなどでしょう。
コントローラーの走行制御は、スイッチで前進(D)、後進(R)、停車(P)があり、スピードコントロールもスイッチで低速(Lo)、高速(Hi)の切り替えが可能です。最大速度は19Km/hです。

今はステアリングに埋め込んでいます。
全てのスイッチ、アクセルレバーの組合せで正常動作を確認できました。ブレーキの効き具合も調整済みです。
試運転しましたが、操舵はラックアンドピニオンではなく、ゴーカートと同じ方式なので、クイックに動きます。
切り角は45°に設定しているので、最小回転半径も小さく、4m幅の道路でも一度でUターンできます。
第一段階の電動カートPoC制作は完成しました。
と言いたいところですが、リチウムイオン電池の積載に少しをケアを加えます。
PoC (Proof of Concept) Part 7
今回のリチウムイオン電池のパッケージは、原始的でした。18650(3.7V)を100個以上組み合わせたパッケージになっています。
パッケージ内にBMSや保護回路は内蔵されているのと、UL38.3もクリアしているので、安全と信じていますが、衝撃や温度、水漏れなどには注意が必要です。
もともとリチウムイオン電池が格納されていた箱を加工してその中にリチウムイオン電池を入れて保護したいと思います。




緑の養生テープには、「踏 む な」の注意書き。

腰にパイプが当たるので、暫定的にクッションを付けました。
電動PoCカー 完成しました!! 拍手!
毎土日祝に4,5時間ずつ作業して6週間。
設計時間や作業時間、部品の買い物時間もすべて含めた合計時間は、100時間前後でした。
毎度毎度、作業の邪魔をする大敵は、、、「蚊」でした!
この100時間で、殺虫スプレー1本が間もなくなくなります。
このクルマに名前つけます。ハットおじさんの「ハットカー」です。よろしくお願いいたします。
庭の駐車スペースにタープを張って、灼熱の日もー、雨の日もー、風の日もー、頑張って作業してきました。
ご近所の皆様へ
休みの日のたびに、作業音を立てており、申し訳ございませんでした。
お陰様で第一ステップの目標を完遂できました。ありがとうございました。
PoC制作の今後の予定
コントローラーの走行制御、スイッチで前進(D)、後進(R)、停車(P)、スピードコントロールの低速(Lo)、高速(Hi)の切り替えで各配線の電気信号や電圧、タイミングなどと、モータードライバからインホイールモーターへの各配線の電気的制御特性をデジタルオシロスコープやテスターなどを使って分析していきます。
自動ブレーキシステム、自動ステアリングシステムも開発して、PoCカーへ改造を加えてい行きます。
この両方が揃ったとき、自律走行車両のスタート地点に立てたことになります。いつの日になるかはこうご期待。
そうはいっても、寒くなりますので、早めにやるつもりです。。。
PoC (Proof of Concept) Part 8
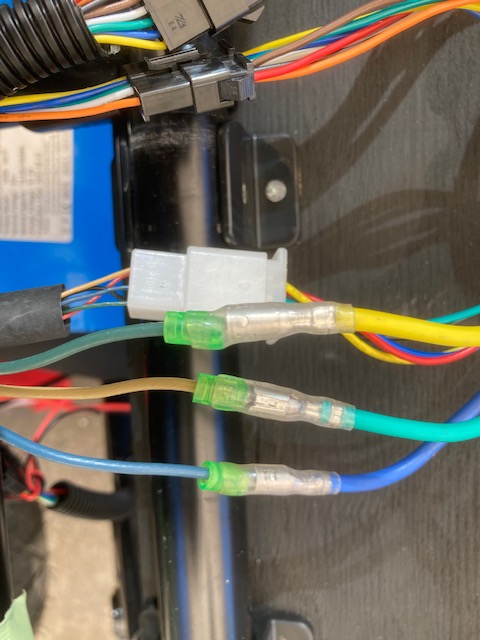
現状システムの分析や解析を進める上で必要になる電気的な電源や信号ラインのテストピンを設置していきます。
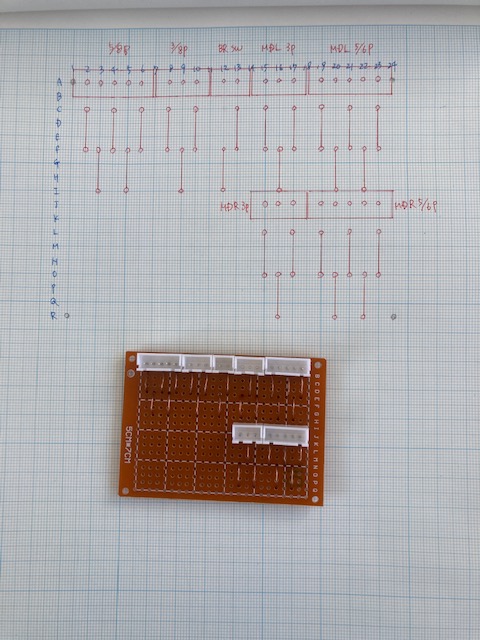


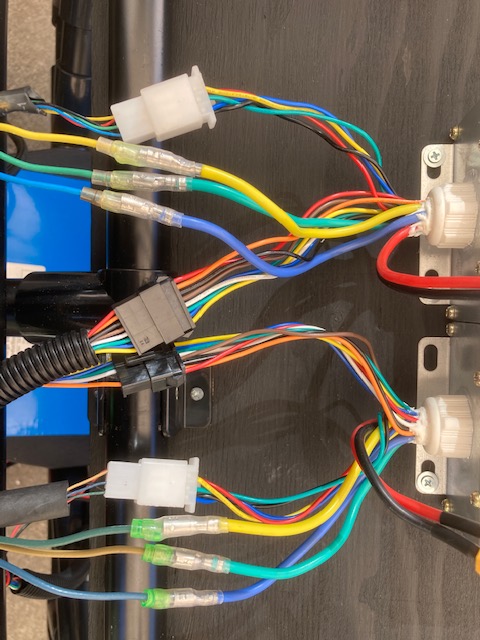
テストピンはもともとの配線コネクターのジョイント部分に中継ハーネスを挟み込み、この中継ハーネスからパラレルに配線を分岐させてテストピン治具と接続、または、元のコネクターから分岐させてテストピン治具と接続します。
元のコネクターが8pで、購入したコネクターは5pが最大だったので、5p+3pにコネクターを分けて制作したりしていて想定より手間暇がかかりました。ピン外しでピンを抜いて、5p+3pに挿し直したり、新たに線材にピンをカシメてコネクターハーネスを作ったりです。手持ちの鉸め器は年季が入っていて、やり直しが多くてダメですね。買換えかな。
ふと気が付くと、タイヤにカマキリが付いていました。以前に紹介したカマキリだとすると大きくなっていました。あれからは見かけずだったので、どこにいたんだろう?

前日はトンボもやってきました。
アキアカネですかね。
PoC (Proof of Concept) Part 9
TESTピンは完成しましたが、その前に、保安部品を実装していこうと思います。
デイライト、ヘッドライト、ストップランプ、ウィンカーなどを取り付けます。ドアミラーやルームミラーなどの後方確認はカメラとモニターで実装する予定です。
メインバッテリーは60V(72V)のリチウムイオン電池なので、72V入力DCDCコンバーターで12Vと5Vを設置します。光物系は12Vで駆動します。
左が12V、右が5VのDCDCコンバーター。

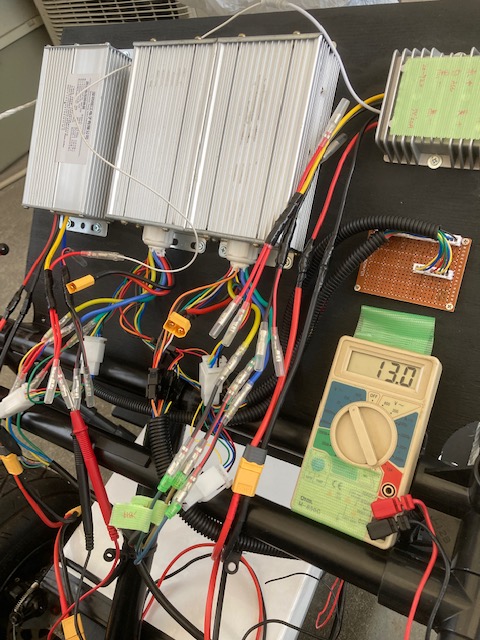
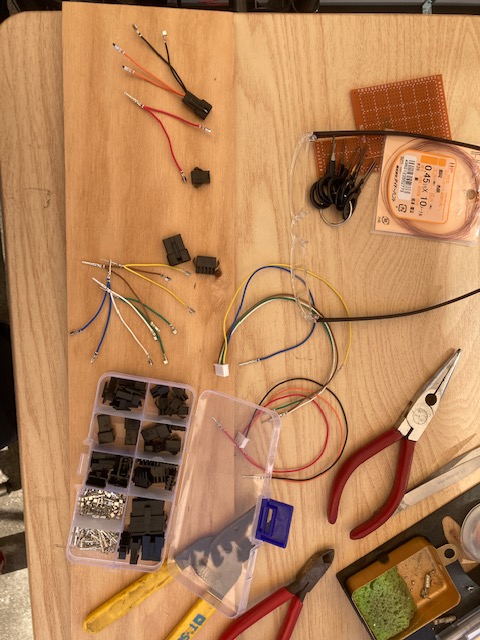

こんな感じで、配線ケーブルや分岐ケーブルを線材をカットして、端子を付けて、コネクターに嵌め込んでを繰り返してたくさん作っていきます。
この作業がなかなか時間がかかります。
鉸めるとき、失敗することも多々あります。
端子が小さいので、老眼鏡必須。
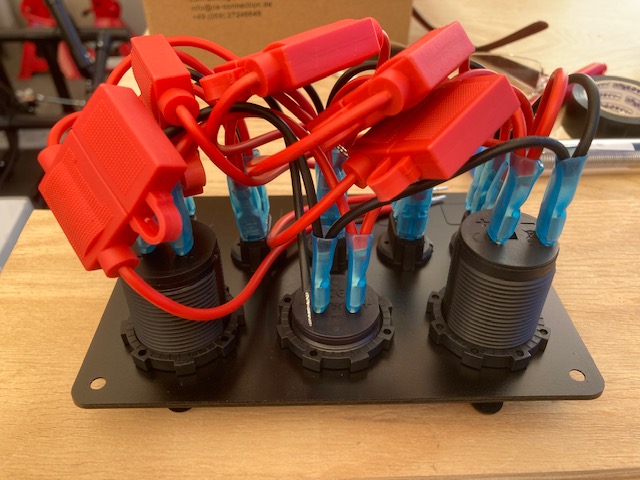
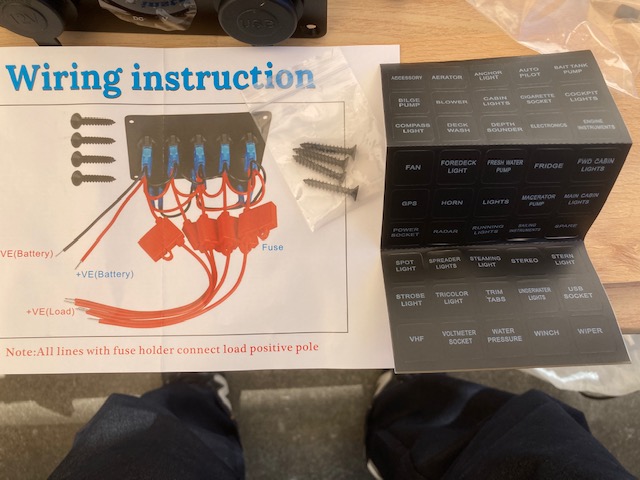
電装品はON/OFFスイッチが多数必要になります。スイッチを探していると、割安なスイッチASSYを見つけました。


ちと、一休み。
外で食べるカップヌードルは美味い!
自宅の庭であっても。
フタの裏の絵は当たりらしいです。


スモールと、フラッシュストップランプです。
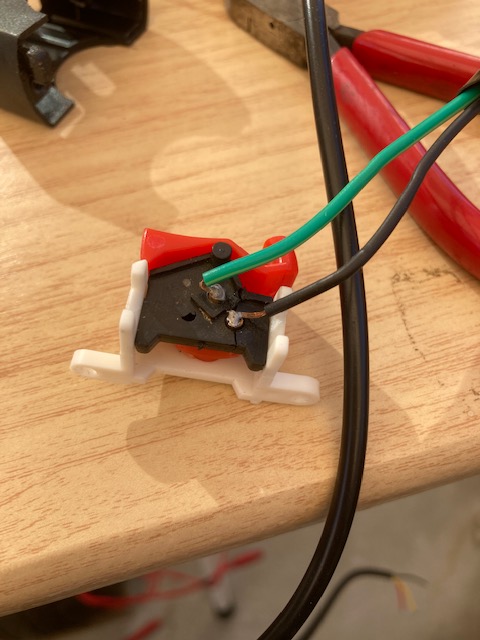
スイッチが動かないのでばらしたところ、樹脂のバリが引っかかっていたのと、端子部分が割れていました。使わないので、クレームは出していません。



取付穴Φ20mmなのですが、Φ20mmの手持ちドリルがなくて苦労しました。彫刻刀で穴を削りました。。。
すべての配線、コネクター、ギボシ、分岐、コルゲートチューブ巻き、工数がかかりました。配線回路や配線図は頭の中で現物合わせで作成していきましたが、図面は残しておこうと思っています。
指先がヒリヒリしています。主な原因はコルゲートチューブですかね。
流れるウインカーで今風に。
うまく撮影できませんでした。
フロントウインカーも流れます。
この映像ではわかりにくいですよね。
フラッシュは片目ずつ点灯するなどすると、運行状態や周囲とのコミュニケーションを図ることが可能になります。
これでバックミラー以外は普通のクルマやバイクなどと同等の装備を実装しました。
単純なバックミラーでは面白くないので、カメラとモニターでの後方確認にします。
後々、後方カメラは自律走行時のセンサーとしても兼用していきたいので、取付位置、カメラ仕様・性能を思案中です。
音も出したいですねー。
クラクションもピーとか、パーとかではなく、考えたいですね。効果音を。

最初はこれでした。
これが、ここまで変化しました。
影も形もないほどに。
土日祝のみの作業で9週間前後かかりました。
車両らしくなり、ゴーカートより一皮むけたと思います。
あくまでも、PoC、原理試作です。
が、ソフト開発の世界でいう、β版までに仕上げていきます。

PoC (Proof of Concept) Part 10
ハザードスイッチを付けて、左右同時点灯できるようにしました。
しかしながら、、、ハザードONしてから20秒くらい経つと、前後左右4つのウィンカーの点灯が同期しなくなりました。。。さすが安物です。
一般の車両はリレーでカッチカッチとなっているので、必ず同期できますが、流れるウィンカーの場合は、4つのウィンカーそれぞれで動作しているので個体のバラツキでだんだんタイミングがずれていくようです。一般車ではありえませんが、ご愛嬌ということで。笑ってしまいました。
バッテリーBOXは塗装しました。白から艶消し黒にすると車両全体が真っ黒になりました。



刷毛で塗ったので、ヘアラインができています
自律走行車両

お気軽にお問い合わせください。090-1050-5159受付時間 9:00-17:00 [ 土・日・祝日除く ]
info@yuhidou.com